 Information Channel and MIA agents
Information Channel and MIA agents
Abstract
In this paper, we look at how Artificial Swarm Intelligence can evolve using evolutionary algorithms that try to minimize the sensory surprise of the system. We will show how to apply the free-energy principle, borrowed from statistical physics, to quantitatively describe the optimization method (sensory surprise minimization), which can be used to support lifelong learning.
We provide our ideas about how to combine this optimization method with evolutionary algorithms in order to boost the development of specialized Artificial Neural Networks, which define the proprioceptive configuration of particular robotic units that are part of a swarm.
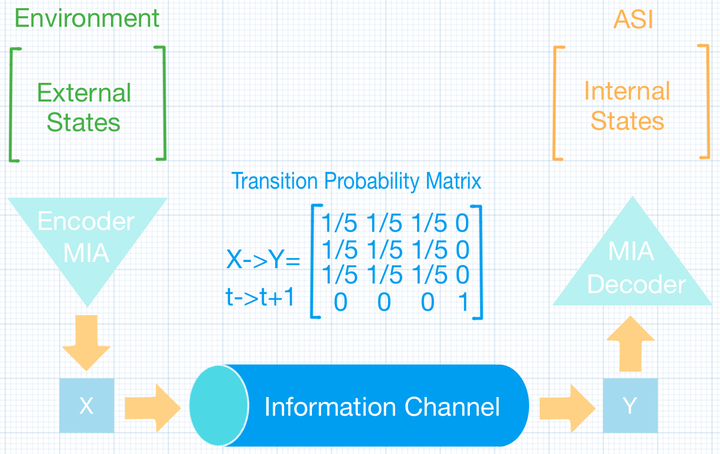
We consider how optimization of the free-energy can promote the homeostasis of the swarm system, i.e. ensures that the system remains within its sensory boundaries throughout its active lifetime.We show how complex distributed cognitive systems can be build in the form of hierarchical modular system, which consists of specialized micro-intelligent agents connected through information channels.
We also considered the co-evolution of various robotic swarm units, which can result in development of proprioception and a comprehensive awareness of the properties of the environment.
And finally, we provide a brief outline of how this system can be implemented in practice and of our progress in this area.
Iaroslav Omelianenko
CTO/Research Director at NewGround LLC
My research interests include genetic algorithms/neuroevolution, synthetic cognitive systems, smart environment, and cooperative robotics.